algorithm for searching cells and points on a grid More...
Go to the source code of this file.
Functions | |
| struct point_sphere_part_search * | yac_point_sphere_part_search_new (size_t num_points, yac_const_coordinate_pointer coordinates_xyz, yac_int const *ids) |
| struct point_sphere_part_search * | yac_point_sphere_part_search_mask_new (size_t num_points, yac_const_coordinate_pointer coordinates_xyz, yac_int const *ids, int const *mask) |
| void | yac_delete_point_sphere_part_search (struct point_sphere_part_search *search) |
| void | yac_point_sphere_part_search_NN (struct point_sphere_part_search *search, size_t num_points, double(*coordinates_xyz)[3], double *cos_angles, double(**result_coordinates_xyz)[3], size_t *result_coordinates_xyz_array_size, size_t **local_point_ids, size_t *local_point_ids_array_size, size_t *num_local_point_ids) |
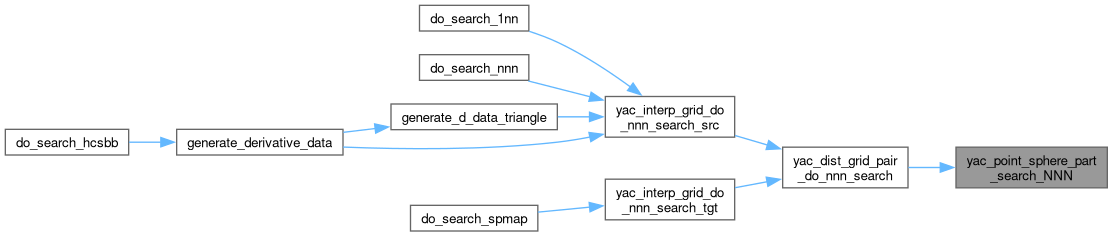
| void | yac_point_sphere_part_search_NNN (struct point_sphere_part_search *search, size_t num_points, double(*coordinates_xyz)[3], size_t n, double **cos_angles, size_t *cos_angles_array_size, double(**result_coordinates_xyz)[3], size_t *result_coordinates_xyz_array_size, size_t **local_point_ids, size_t *local_point_ids_array_size, size_t *num_local_point_ids) |
| int | yac_point_sphere_part_search_bnd_circle_contains_points (struct point_sphere_part_search *search, struct bounding_circle circle) |
| struct bnd_sphere_part_search * | yac_bnd_sphere_part_search_new (struct bounding_circle *circles, size_t num_circles) |
| void | yac_bnd_sphere_part_search_delete (struct bnd_sphere_part_search *search) |
| void | yac_bnd_sphere_part_search_do_point_search (struct bnd_sphere_part_search *search, yac_coordinate_pointer coordinates_xyz, size_t count, size_t **cells, size_t *num_cells_per_coordinate) |
| void | yac_bnd_sphere_part_search_do_bnd_circle_search (struct bnd_sphere_part_search *search, struct bounding_circle *bnd_circles, size_t count, size_t **cells, size_t *num_cells_per_bnd_circle) |
Detailed Description
algorithm for searching cells and points on a grid
yac_point_sphere_part_search_new generates a tree structure, which makes it easy to look for points. A documentation of the respective algorithm can be found at Sphere Partitioning Algorithm.
Definition in file sphere_part.h.
Function Documentation
◆ yac_bnd_sphere_part_search_delete()
| void yac_bnd_sphere_part_search_delete | ( | struct bnd_sphere_part_search * | search | ) |
Definition at line 1953 of file sphere_part.c.


◆ yac_bnd_sphere_part_search_do_bnd_circle_search()
| void yac_bnd_sphere_part_search_do_bnd_circle_search | ( | struct bnd_sphere_part_search * | search, |
| struct bounding_circle * | bnd_circles, | ||
| size_t | count, | ||
| size_t ** | cells, | ||
| size_t * | num_cells_per_bnd_circle | ||
| ) |
Definition at line 1869 of file sphere_part.c.
◆ yac_bnd_sphere_part_search_do_point_search()
| void yac_bnd_sphere_part_search_do_point_search | ( | struct bnd_sphere_part_search * | search, |
| yac_coordinate_pointer | coordinates_xyz, | ||
| size_t | count, | ||
| size_t ** | cells, | ||
| size_t * | num_cells_per_coordinate | ||
| ) |
Definition at line 1823 of file sphere_part.c.

◆ yac_bnd_sphere_part_search_new()
| struct bnd_sphere_part_search * yac_bnd_sphere_part_search_new | ( | struct bounding_circle * | circles, |
| size_t | num_circles | ||
| ) |
Definition at line 543 of file sphere_part.c.

◆ yac_delete_point_sphere_part_search()
| void yac_delete_point_sphere_part_search | ( | struct point_sphere_part_search * | search | ) |
Definition at line 1943 of file sphere_part.c.

◆ yac_point_sphere_part_search_bnd_circle_contains_points()
| int yac_point_sphere_part_search_bnd_circle_contains_points | ( | struct point_sphere_part_search * | search, |
| struct bounding_circle | circle | ||
| ) |
This routine returns true if the provided point_sphere_part_search contains a point that is within the provided bounding circle.
Definition at line 1713 of file sphere_part.c.

◆ yac_point_sphere_part_search_mask_new()
| struct point_sphere_part_search * yac_point_sphere_part_search_mask_new | ( | size_t | num_points, |
| yac_const_coordinate_pointer | coordinates_xyz, | ||
| yac_int const * | ids, | ||
| int const * | mask | ||
| ) |
Definition at line 685 of file sphere_part.c.

◆ yac_point_sphere_part_search_new()
| struct point_sphere_part_search * yac_point_sphere_part_search_new | ( | size_t | num_points, |
| yac_const_coordinate_pointer | coordinates_xyz, | ||
| yac_int const * | ids | ||
| ) |
Definition at line 659 of file sphere_part.c.
◆ yac_point_sphere_part_search_NN()
| void yac_point_sphere_part_search_NN | ( | struct point_sphere_part_search * | search, |
| size_t | num_points, | ||
| double(*) | coordinates_xyz[3], | ||
| double * | cos_angles, | ||
| double(**) | result_coordinates_xyz[3], | ||
| size_t * | result_coordinates_xyz_array_size, | ||
| size_t ** | local_point_ids, | ||
| size_t * | local_point_ids_array_size, | ||
| size_t * | num_local_point_ids | ||
| ) |
This routine does a nearest neighbour search between the points provided to this routine and the matching yac_point_sphere_part_search_new call.
Definition at line 1180 of file sphere_part.c.


◆ yac_point_sphere_part_search_NNN()
| void yac_point_sphere_part_search_NNN | ( | struct point_sphere_part_search * | search, |
| size_t | num_points, | ||
| double(*) | coordinates_xyz[3], | ||
| size_t | n, | ||
| double ** | cos_angles, | ||
| size_t * | cos_angles_array_size, | ||
| double(**) | result_coordinates_xyz[3], | ||
| size_t * | result_coordinates_xyz_array_size, | ||
| size_t ** | local_point_ids, | ||
| size_t * | local_point_ids_array_size, | ||
| size_t * | num_local_point_ids | ||
| ) |
This routine does a n nearest neighbour search between the points provided to this routine and the matching yac_point_sphere_part_search_new call.
Definition at line 1533 of file sphere_part.c.